Schlitz und Unterbau
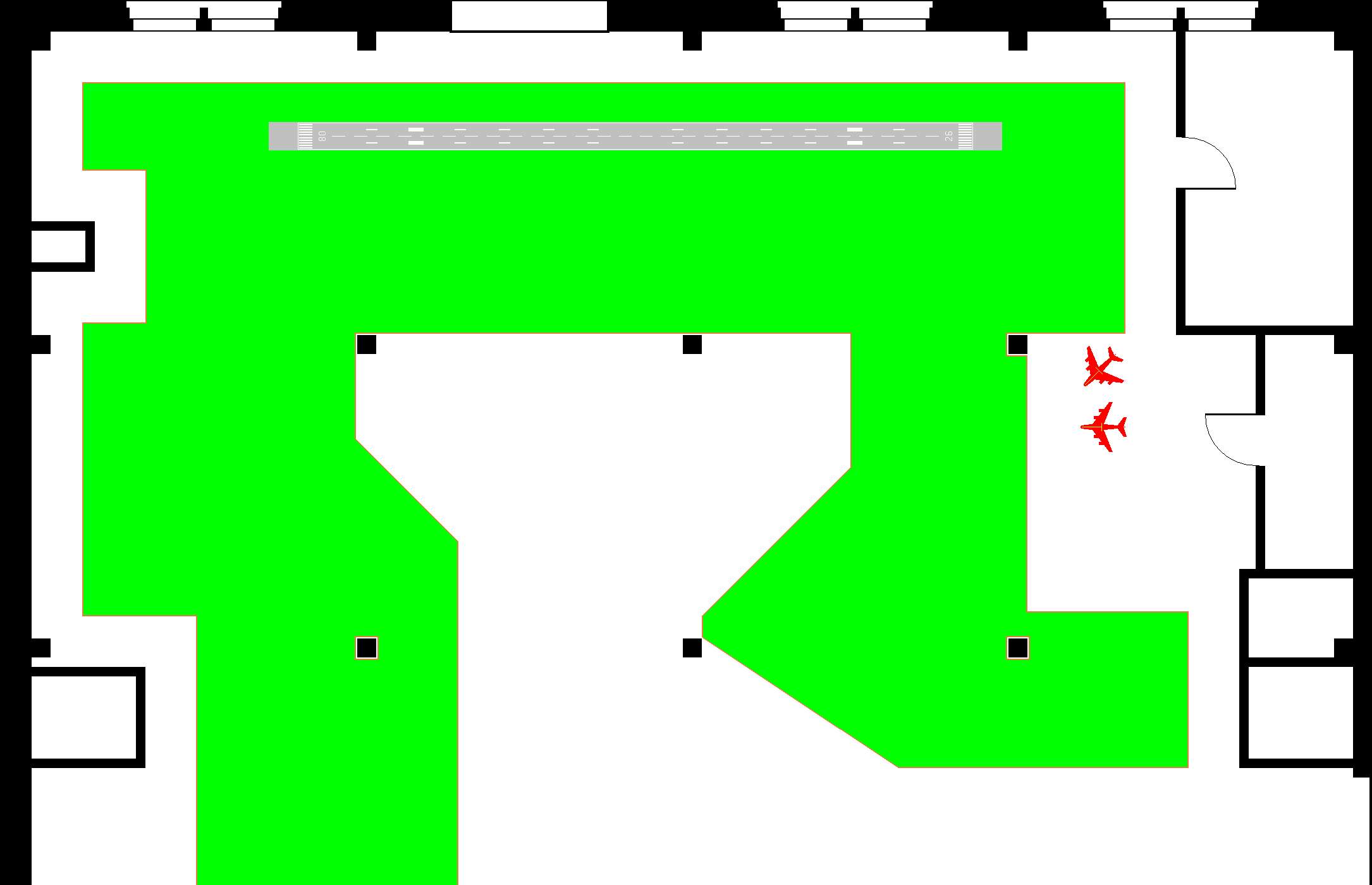
Eine Gemeinsamkeit der drei hier vorgestellten Simulationslösungen ist der Schlitz, der durch die ganze Start- und Landebahn geht inklusive der beiden Bereiche vor Kopf, wo die Übergabe in die Schattenhangarwelt erfolgen soll. Das ergibt eine ca. 15 Meter lange Trennlinie zwischen dem hinteren und vorderen Anlagentisch, die bis zum Fußboden reicht.
Die Kanten dieser Trennlinie müssen auf der ganzen Länge ständig auf Sollmaß gehalten werden!

Unter dieser Trennlinie befindet sich ein Schlitten, Katapult oder Roboter. Wenn ich mal das Wackeln mit den Tragflächen ausklammere, würde weder der Schlitten, noch das Katapult, noch der Roboter zu sehen sein. Nur ein oder zwei Stäbe reichen durch den Schlitz nach oben, um die Flugzeuge zu bewegen, und sind für die Besucher sichtbar.
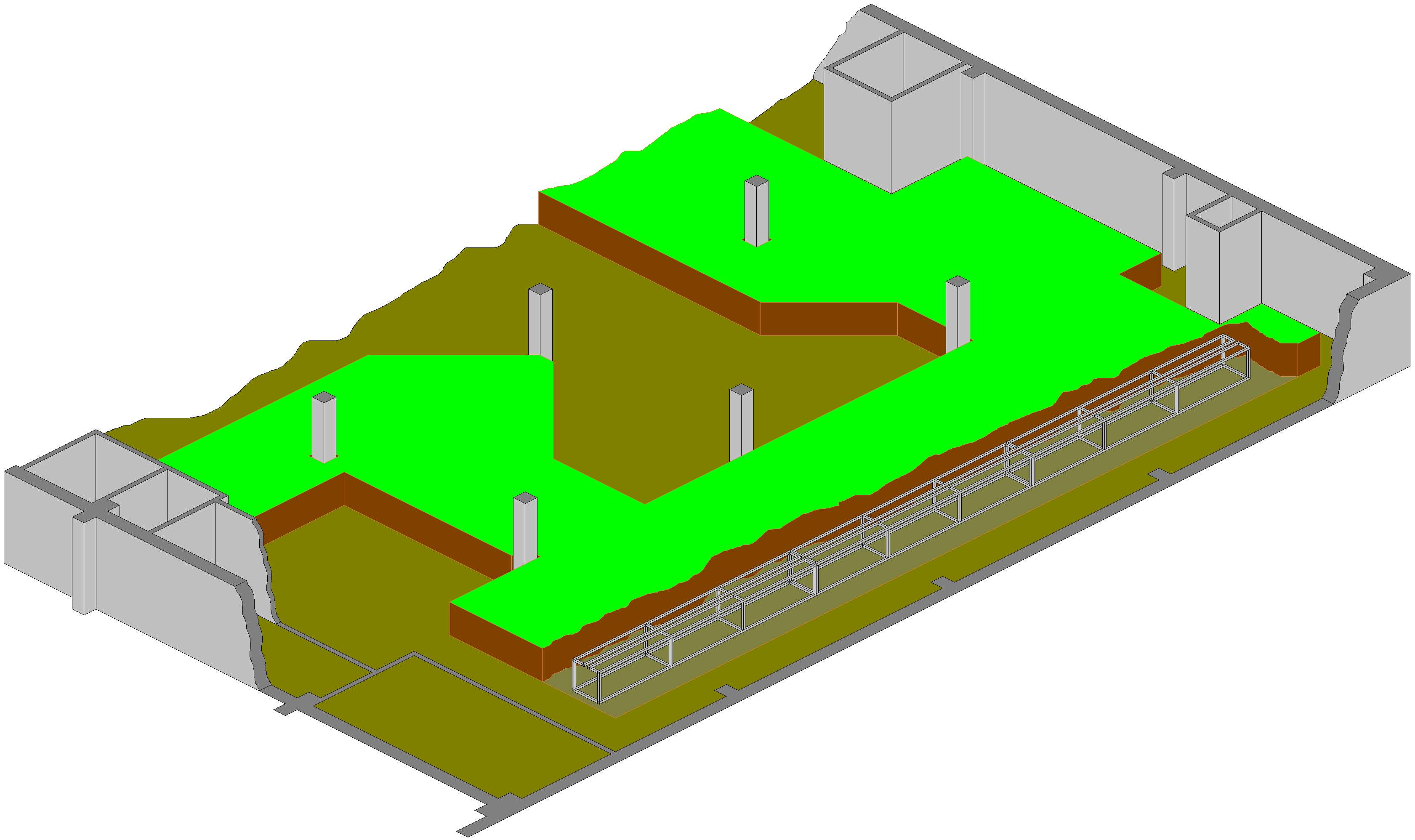
Der Anlagentisch ist hier ca. 80 cm hoch, entsprechend klein muss die Technik darunter sein. Ein Roboter z.B. dürfte, ich schätze, die Führungsschienen mitgerechnet, maximal 60 cm hoch sein. In der Breite ist der Platz nicht zwangsweise limitiert, nur bedeutet ein sehr breiter Raum entsprechend hohe Ungenauigkeit beim Sollmaß der Schlitzkanten. Zum Platzbedarf eines Roboters hat @groflo in seinem Beitrag
88327 vom 21.9.2005 einige interessante Anmerkungen gemacht.
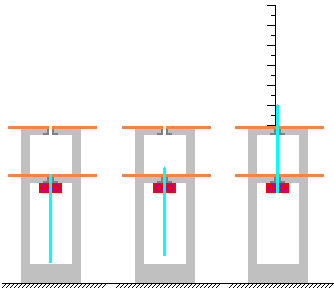
Ich hoffe, dass eine Genauigkeit von einem Millimeter an jeder Stelle der Schlitzkanten erreicht werden kann. Schlitten und Katapult könnten auf beiden Seiten des Schlitzes geführt werden, somit an der Stelle, an der sie sich gerade befinden, ein genaues Zusammenpassen erzwingen. Der Roboter würde wahrscheinlich über Schienen am Boden geführt werden und hätte diesen Vorteil nicht.
Gerrit hat in seinem Beitrag
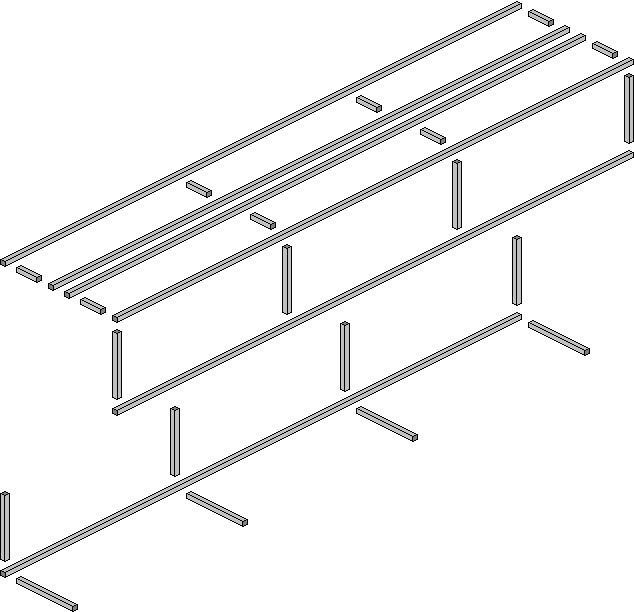
88207 vom 20.9.2005 den Unterbau zum Stützen des Schlitzes so beschrieben:
Der Schlitz besteht aus zwei direkt nebeneinander verlaufenden Vierkant-Stahlträgern (5cm). Waagerecht im 90 Grad Winkel dazu werden ca. alle 50 cm ca. 30 cm lange Querstreben direkt unter der Platte angeschweißt. An deren Ende gehen jeweils sagen wir mal 60 cm lange Streben Richtung Boden. Das Ganze wird jetzt mit Querstreben so versteigt, das ein Verwindung nur noch minimal stattfinden kann. Die Befestigung des Ganzen am Boden ist gar nicht das entscheidende. Entscheidend ist, das im Falle eines "Arbeitens" des Systems immer gewährleistet ist, dass Schlitz und Schlitten-Aufnahme gemeinsam "arbeiten".
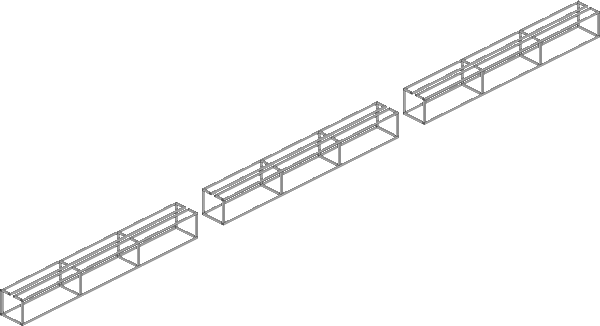
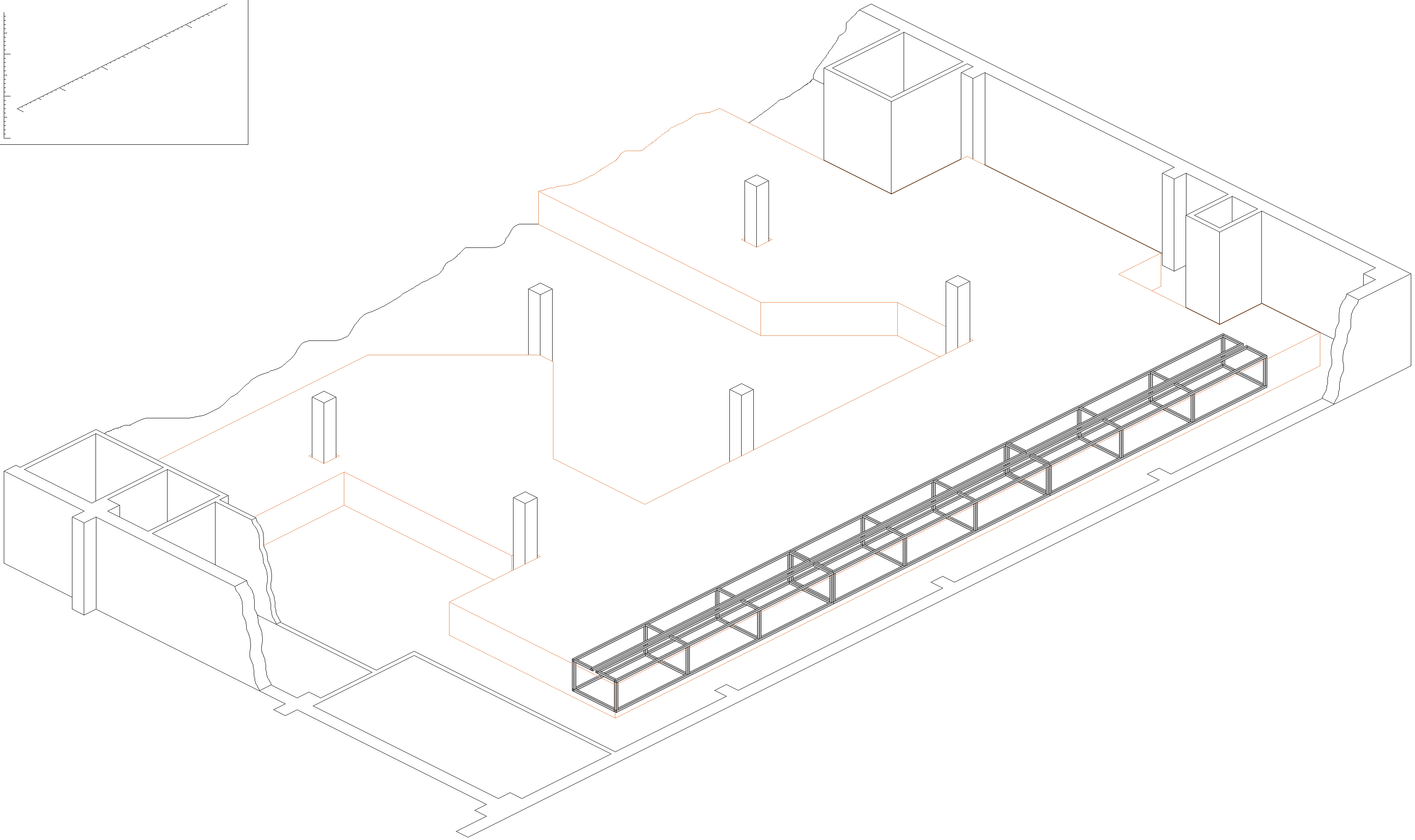
Das wäre ein Unterbau nach dem "Schlangenskelett"-Prinzip, der auch Bewegungen des Fußbodens mitmacht. Ich selber bin der Ansicht, der Unterbau zur Gewährleistung eines konstanten Schlitzes muss als eine einzige feste Einheit ausgeführt werden. Ein Kasten aus Leichtmetallprofilen, aus drei Segmenten von jeweils 5 Metern zusammengefügt, und 80 * 80 cm im Querschnitt (z.B. mein Beitrag
95614 vom 7.1.2006).
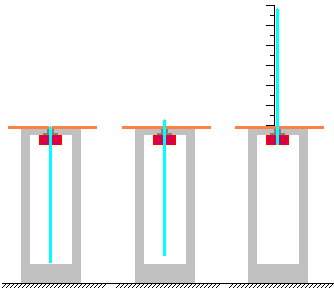
Fazit: Die Roboter-Lösung benötigt den voluminösesten Unterbau, auch wenn der Roboter nicht die Flugzeuge durch den Unterbau transportieren soll. Die 2-Stab-Lösung benötigt einen schmaleren Unterbau bis zum Fußboden, der aber immer an der Stelle, an der sich der Schlitten gerade befindet, durch die beidseitige Führung direkt unter den Schlitzkanten auf Sollmaß gebracht wird. Die Katapult-Lösung käme eventuell mit einem flacheren Unterbau aus, wenn die Flugzeuge ebenerdig in die Schattenhangarwelt überführt werden sollen. Auch hier hilft eine beidseitige Führung.